Первая советская передвижная МБР
РТ-20 (РТ-20П) (индекс ГРАУ — 8К99, по классификации МО США и НАТО — SS-Х-15 Scrooge (рус. Скряга)) — советская межконтинентальная баллистическая ракета в составе подвижного ракетного комплекса наземного базирования 15П699. Первая мобильная МБР разработанная в СССР. На вооружение не принималась

Головные части — моноблочные, термоядерные. «Легкая» головная часть имела корпус, выполненный в виде набора трех усеченных конусов со сферическим притуплением. Для уменьшения аэродинамического сопротивления на «легкой” головной части устанавливался конический обтекатель, сбрасываемый во время работы двигателя второй ступени, когда ракета достигнет разряженных слоев атмосферы. Головная часть крепилась к верхнему стыковочному шпангоуту приборного отсека с помощью трех разрывных болтов. Для отделения головной части от второй ступени ракеты использовались три двигателя обратной тяги. [4]
Приборный отсек в случае использования «легкой» головной части имеет форму усеченного конуса, «тяжелой» головной части — цилиндрическую форму. В приборном отсеке размещена основная часть приборов системы управления ракетой. Система управления ракетой 8К99 — инерциальная, автономная с гироприборами на воздушном подвесе ( вес СУ- 250кг) и быстродействующей цифровой вычислительной машиной. Связь бортовой аппаратуры с пусковой установкой осуществляется с помощью двух блоков разъемов, один из которых расположен на боковой поверхности корпуса приборного отсека другой — на контейнере.
Перед выходом ракеты из контейнера при помощи разрывных болтов и отталкивающих пружин происходит разделение блока разъемов контейнера. После выхода ракеты из контейнера аналогичным образом разделяется блок разъемов ракеты. Оставшаяся на ракете часть блока закрывается крышкой. Приборный отсек крепится болтами к верхнему торцевому шпангоуту топливного отсека.
Топливный отсек представляет собой емкость, разделенную промежуточным днищем на две полости: верхнюю для окислителя и нижнюю для горючего. В качестве окислителя используется азотный тетраоксид в качестве горючего — несимметричный диметилгидразин (НДМГ) К нижнему торцевому шпангоуту топливного отсека при помощи стержневой рамы крепится жидкостный ракетный двигатель 15Д12 второй ступени.

Управление второй ступенью по углам тангажа и рысканья осуществляется вдувом турбогаза в закритическую часть сопла двигателя. Для управления по крену служат две пары тангенцильно установленных управляющих сопла, также использующих турбогаз.
Разделение ступеней «горячее», т.е. срабатывание разрывных болтов происходит после запуска двигательной установки второй ступени. В оболочке переходного отсека имеются окна, обеспечивающие выход газов на начальной стадии процесса разделения. Соударение корпуса переходного отсека с двигателем второй ступени при разделении, исключено специально принятыми конструктивными мерами.
Переходной отсек с помощью болтов соединен с твердотопливным двигателем первой ступени. На переднем днище двигателя первой ступени расположен пороховой ракетный двигатель конечной ступени, запускаемый после выгорания топлива в двигателе первой ступени и заканчивающий свою работу после разрыва связей между ступенями ракеты. Сопло двигателя конечной ступени выходит в полость основного двигателя.

К нижнему торцевому шпангоуту двигателя первой ступени крепится хвостовой отсек, предохраняющий сопла двигателя и рулевой привод от воздействия потока воздуха и газовых струй. Исполнительными органами системы управления первой ступени являются четыре поворотных сопла твердотопливного двигателя. Вдоль корпусов обеих ступеней ракеты снаружи проложены и закреплена с помощью кронштейнов бортовая кабельная сеть, с противоположной стороны вдоль корпуса второй ступени проложены трубопроводы пневмогидравлической системы.
Крепление ракеты к опорным пятям контейнера производится с помощью восьми разрывных болтов, установленных на нижнем торцевом шпангоуте двигателя первой ступени. Радиальному перемещению ракеты и контейнера препятствуют четыре опорных кольца.

Старт ракеты производится из вертикально расположенного контейнера. Пусковой контейнер — термостатирован. Перед стартом осуществляется азимутальное прицеливание ракеты, которое заключается в совмещении оси Х гиростабилизированной платформы с плоскостью стрельбы. Грубое совмещение оси Х с плоскостью стрельбы (±10°) производится путем разворота стартового агрегата, в точное — поворотом гиростабилизированной платформы. Ввод полетного задания в СУ — дистанционный.
По команде «Пуск» начинаются операции, предшествующие старту ракете: проверка бортовых систем, переключение ракеты на бортовое питание и т.д. Примерно через 3мин, после команды «Пуск» подрывается удлиненный кумулятивный заряд крышки ТПК, запускается пороховой двигатель увода крышки и последняя отделяется от контейнера. После разделения блока разъемов контейнера и разрыва болтов крепления ракеты к ТПК запускается пороховой аккумулятор давления, расположенный в контейнере, и при достижении в подракетном объема давления 6х105Н/м2 ракета начинает движение.
Форма порохового заряда аккумулятора давления выбрана таким образом, что указанное давление в подракетном объеме в процессе движения ракеты в контейнере поддерживается постоянным. В момент выхода из ТПК ракета достигает скорости 30м/с. На высоте 10-20м над срезом контейнера происходит запуск РДТТ первой ступени. Одновременно осуществляется отделение опорных колец и разделение блока разъемов ракеты. Двигатель первой ступени работает примерно 58с. При падении давления в камере до 5х105Н/м2 запускается пороховой двигатель конечной ступени, который, работает до полного выгорания топлива. Через 11с после запуска двигателя конечной ступени запускается двигатель второй ступени, при выходе которого на режим 90% номинальной тяги происходит разделение ступеней ракеты.

В случае использования, «легкой» головной части на 56с работы двигателя второй ступени производится сброс головного обтекателя. При достижении требуемого сочетания параметров движения ракеты (скорости, координат и др.), обеспечивающего заданную дальность стрельбы, система управления подает команду на выключение двигателя. Одновременно производится отделение головной части.
Перед выходом ракеты из ТПК. в случае необходимости, мояет быть произведено аварийное прекращение пуска. Предусмотрена также возможность аварийного подрыва ракеты в полете.
На первой ступени ракета в качестве органов управления используются четыре поворотных сопла твердотопливного двигателя. Поворот сопл осуществляется гидравлическими рулевыми машинами. Для выработки газа используется пороховой аккумулятор давления. Управление второй ступенью ракеты по углам тангажа и рыскания осуществляется посредством вдува газа в закритическую часть сопла ЖРД.
Вторая ступень проектировалась и выпускалась в ампулизированном исполнении. Управление второй ступенью по углу крена осуществляется двумя парами тангенциально установленных управляющих сопл. Для работы управляющих сопл и вдува используется газ, отбираемый после турбины турбонасосного агрегата двигательной установки второй ступени (турбогаз). Подача газа на вдув и в управляющие сопла осуществляется газораспределителями, которые приводятся в действие электродвигателями.

Каждый из первых четырех каналов управления представляет собой замкнутую систему автоматического регулирования, работающую по принципу устранения рассогласования между текущим значением регулируемого параметра и его программным значением. Работа пятого и шестого каналов осуществляется по разомкнутой схеме, т.е. при выполнении необходимых условий подаются команды на разделение ступеней, выключение двигателя второй ступени и отделение головной частя.
В ракете реализовано так называемое «горячее» разделение ступеней, при котором отделение первой ступени происходит после запуска двигателя второй ступени. В конце работы двигателя первой ступени ракета набирает высоту около 27км. Производить разделение ступеней на столь малой высоте невыгодно, поскольку из-за больших аэродинамических сил, действующих на ракету, потребовались бы значительные усилия для разведения ступеней на безопасное расстояние. В связи с этим ступени разделяются после достижения ракетой высоты ~ 40 км. В период подъема до этой высоты управляемость ракета обеспечивается вспомогательным двигателем — пороховым ракетным двигателем конечной ступени тяги, который запускается после выгорания топлива в двигателе первой ступени.
Отделение головной части производится в конце активного участка траектории в период последействия тяги двигателя второй ступени. Сначала срабатывают три разрывных болта, при помощи которых головная часть крепится к приборному отсеку, а затем производится торможение ракетной части второй ступени за счет истечения газа наддува бака окислителя через два противосопла, расположенных на переднем днище бака.
Противосопла сообщаются с атмосферой через два люка в корпусе приборного отсека. Вскрытие сопл происходит в результате срабатывания удлиненных детонирующих зарядов, приводимых в действие электродетонаторами. Крышки люков приборного отсека вышибаются заглушками, вылетающими из сопл. После вскрытия сопл срабатывает пироклапан, через который газ наддува истекает в направлении, перпендикулярном продольной оси ракеты. В результате этого вторая ступень, выполняющая также роль ложной цели, уводится с траектории головной части.


Головные части — моноблочные, термоядерные. «Легкая» головная часть имела корпус, выполненный в виде набора трех усеченных конусов со сферическим притуплением. Для уменьшения аэродинамического сопротивления на «легкой” головной части устанавливался конический обтекатель, сбрасываемый во время работы двигателя второй ступени, когда ракета достигнет разряженных слоев атмосферы. Головная часть крепилась к верхнему стыковочному шпангоуту приборного отсека с помощью трех разрывных болтов. Для отделения головной части от второй ступени ракеты использовались три двигателя обратной тяги. [4]
Приборный отсек в случае использования «легкой» головной части имеет форму усеченного конуса, «тяжелой» головной части — цилиндрическую форму. В приборном отсеке размещена основная часть приборов системы управления ракетой. Система управления ракетой 8К99 — инерциальная, автономная с гироприборами на воздушном подвесе ( вес СУ- 250кг) и быстродействующей цифровой вычислительной машиной. Связь бортовой аппаратуры с пусковой установкой осуществляется с помощью двух блоков разъемов, один из которых расположен на боковой поверхности корпуса приборного отсека другой — на контейнере.
Перед выходом ракеты из контейнера при помощи разрывных болтов и отталкивающих пружин происходит разделение блока разъемов контейнера. После выхода ракеты из контейнера аналогичным образом разделяется блок разъемов ракеты. Оставшаяся на ракете часть блока закрывается крышкой. Приборный отсек крепится болтами к верхнему торцевому шпангоуту топливного отсека.
Топливный отсек представляет собой емкость, разделенную промежуточным днищем на две полости: верхнюю для окислителя и нижнюю для горючего. В качестве окислителя используется азотный тетраоксид в качестве горючего — несимметричный диметилгидразин (НДМГ) К нижнему торцевому шпангоуту топливного отсека при помощи стержневой рамы крепится жидкостный ракетный двигатель 15Д12 второй ступени.
Управление второй ступенью по углам тангажа и рысканья осуществляется вдувом турбогаза в закритическую часть сопла двигателя. Для управления по крену служат две пары тангенцильно установленных управляющих сопла, также использующих турбогаз.
Разделение ступеней «горячее», т.е. срабатывание разрывных болтов происходит после запуска двигательной установки второй ступени. В оболочке переходного отсека имеются окна, обеспечивающие выход газов на начальной стадии процесса разделения. Соударение корпуса переходного отсека с двигателем второй ступени при разделении, исключено специально принятыми конструктивными мерами.
Переходной отсек с помощью болтов соединен с твердотопливным двигателем первой ступени. На переднем днище двигателя первой ступени расположен пороховой ракетный двигатель конечной ступени, запускаемый после выгорания топлива в двигателе первой ступени и заканчивающий свою работу после разрыва связей между ступенями ракеты. Сопло двигателя конечной ступени выходит в полость основного двигателя.
К нижнему торцевому шпангоуту двигателя первой ступени крепится хвостовой отсек, предохраняющий сопла двигателя и рулевой привод от воздействия потока воздуха и газовых струй. Исполнительными органами системы управления первой ступени являются четыре поворотных сопла твердотопливного двигателя. Вдоль корпусов обеих ступеней ракеты снаружи проложены и закреплена с помощью кронштейнов бортовая кабельная сеть, с противоположной стороны вдоль корпуса второй ступени проложены трубопроводы пневмогидравлической системы.
Крепление ракеты к опорным пятям контейнера производится с помощью восьми разрывных болтов, установленных на нижнем торцевом шпангоуте двигателя первой ступени. Радиальному перемещению ракеты и контейнера препятствуют четыре опорных кольца.
Старт ракеты производится из вертикально расположенного контейнера. Пусковой контейнер — термостатирован. Перед стартом осуществляется азимутальное прицеливание ракеты, которое заключается в совмещении оси Х гиростабилизированной платформы с плоскостью стрельбы. Грубое совмещение оси Х с плоскостью стрельбы (±10°) производится путем разворота стартового агрегата, в точное — поворотом гиростабилизированной платформы. Ввод полетного задания в СУ — дистанционный.
По команде «Пуск» начинаются операции, предшествующие старту ракете: проверка бортовых систем, переключение ракеты на бортовое питание и т.д. Примерно через 3мин, после команды «Пуск» подрывается удлиненный кумулятивный заряд крышки ТПК, запускается пороховой двигатель увода крышки и последняя отделяется от контейнера. После разделения блока разъемов контейнера и разрыва болтов крепления ракеты к ТПК запускается пороховой аккумулятор давления, расположенный в контейнере, и при достижении в подракетном объема давления 6х105Н/м2 ракета начинает движение.
Форма порохового заряда аккумулятора давления выбрана таким образом, что указанное давление в подракетном объеме в процессе движения ракеты в контейнере поддерживается постоянным. В момент выхода из ТПК ракета достигает скорости 30м/с. На высоте 10-20м над срезом контейнера происходит запуск РДТТ первой ступени. Одновременно осуществляется отделение опорных колец и разделение блока разъемов ракеты. Двигатель первой ступени работает примерно 58с. При падении давления в камере до 5х105Н/м2 запускается пороховой двигатель конечной ступени, который, работает до полного выгорания топлива. Через 11с после запуска двигателя конечной ступени запускается двигатель второй ступени, при выходе которого на режим 90% номинальной тяги происходит разделение ступеней ракеты.
В случае использования, «легкой» головной части на 56с работы двигателя второй ступени производится сброс головного обтекателя. При достижении требуемого сочетания параметров движения ракеты (скорости, координат и др.), обеспечивающего заданную дальность стрельбы, система управления подает команду на выключение двигателя. Одновременно производится отделение головной части.
Перед выходом ракеты из ТПК. в случае необходимости, мояет быть произведено аварийное прекращение пуска. Предусмотрена также возможность аварийного подрыва ракеты в полете.
На первой ступени ракета в качестве органов управления используются четыре поворотных сопла твердотопливного двигателя. Поворот сопл осуществляется гидравлическими рулевыми машинами. Для выработки газа используется пороховой аккумулятор давления. Управление второй ступенью ракеты по углам тангажа и рыскания осуществляется посредством вдува газа в закритическую часть сопла ЖРД.
Вторая ступень проектировалась и выпускалась в ампулизированном исполнении. Управление второй ступенью по углу крена осуществляется двумя парами тангенциально установленных управляющих сопл. Для работы управляющих сопл и вдува используется газ, отбираемый после турбины турбонасосного агрегата двигательной установки второй ступени (турбогаз). Подача газа на вдув и в управляющие сопла осуществляется газораспределителями, которые приводятся в действие электродвигателями.
Каждый из первых четырех каналов управления представляет собой замкнутую систему автоматического регулирования, работающую по принципу устранения рассогласования между текущим значением регулируемого параметра и его программным значением. Работа пятого и шестого каналов осуществляется по разомкнутой схеме, т.е. при выполнении необходимых условий подаются команды на разделение ступеней, выключение двигателя второй ступени и отделение головной частя.
В ракете реализовано так называемое «горячее» разделение ступеней, при котором отделение первой ступени происходит после запуска двигателя второй ступени. В конце работы двигателя первой ступени ракета набирает высоту около 27км. Производить разделение ступеней на столь малой высоте невыгодно, поскольку из-за больших аэродинамических сил, действующих на ракету, потребовались бы значительные усилия для разведения ступеней на безопасное расстояние. В связи с этим ступени разделяются после достижения ракетой высоты ~ 40 км. В период подъема до этой высоты управляемость ракета обеспечивается вспомогательным двигателем — пороховым ракетным двигателем конечной ступени тяги, который запускается после выгорания топлива в двигателе первой ступени.
Отделение головной части производится в конце активного участка траектории в период последействия тяги двигателя второй ступени. Сначала срабатывают три разрывных болта, при помощи которых головная часть крепится к приборному отсеку, а затем производится торможение ракетной части второй ступени за счет истечения газа наддува бака окислителя через два противосопла, расположенных на переднем днище бака.
Противосопла сообщаются с атмосферой через два люка в корпусе приборного отсека. Вскрытие сопл происходит в результате срабатывания удлиненных детонирующих зарядов, приводимых в действие электродетонаторами. Крышки люков приборного отсека вышибаются заглушками, вылетающими из сопл. После вскрытия сопл срабатывает пироклапан, через который газ наддува истекает в направлении, перпендикулярном продольной оси ракеты. В результате этого вторая ступень, выполняющая также роль ложной цели, уводится с траектории головной части.
-
 Сергей
Сергей
- 1
Только зарегистрированные и авторизованные пользователи могут оставлять комментарии.
+2
И чему эти никому не нужные подробности??
- ↓
+9
Автор без понятия кому и что пишет. Он бы ещё чертежи и ТУ приложил.
- ↓
+9
Действительно. Написано непонятно. Любую сложную вещь можно описать просто, точно и доходчиво. Я например знаю, как работает управляющее устройство на гироскопах на всех подвесках. Это просто объяснить на рисуночке. А в статье изложено непонятно. Ведь все люди в России грамотные и если умно объяснить — все все поймут. Тут вся сложность в системе управления. Все остальное — это бабах.
- ↓
0
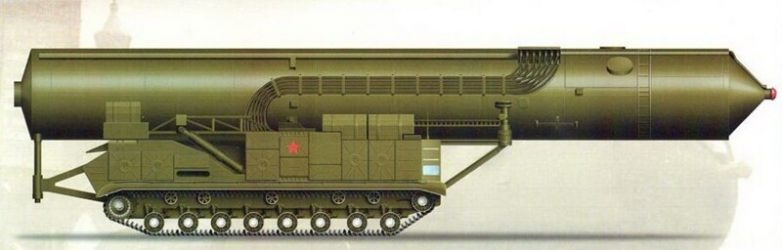
На фотках просто контейнер для хранения ракеты. Больше привычно «отбойники» чем «противосопла»
- ↓
+9
Слишком много технических подробностей. А если я не ракетчик и не ракетостроитель, то тема скучная и не интересная. Может написано так.
- ↓
+7
вид внушительный. но ассоциация с царь пушкой на Красной площади
- ↓
+20
Все замечательно в статье и ракеты мы строить умеем до сих пор и не плохие ракеты. Хорошо хоть, что та, старая школа Королева, Челомея, Чертока, еще держится. Не совсем удачный пример выбран, ракета не была принята на вооружение из-за большого количества аварий при пусках и тем более жидкое топливо да еще агрессивный гептил…
- ↓
+12
Немного Вас поправлю. Мобильные комплексы МБР-всегда твердотопливные. К примеру «Ясень»,«Тополь». В зависимости от платформы. Наземной(колёсная база или железнодорожный состав) или подводной. Намного более эффективный ЖРД применяется в МБР шахтного базирования, т. к. в силу технических положений, ракета заправляется топливом непосредственно перед пуском. РТ-20 это начало-начал мобильных МБР.
- ↑
- ↓
+13
Совершенно с Вами согласен. Именно из-за проблем с хранением жидкого топлива на передвижном комплексе, а если быть точнее, перевозка на себе заправленной ракеты с топливом и окислителем, вызывала многочисленные аварии, поэтому от них и отказались…
- ↑
- ↓